Drone-based laser scanning and hyperspectral imaging conducted at Wytham Woods test site
One of the goals of MetEOC-3 is to provide traceability for estimating terrestrial biophysical Essential Climate Variable (ECV) products through in situ, airborne and satellite measurements. Satellite-derived ECV products and the algorithms they use depend on empirical in situ measurements collected on the ground, which requires long term monitoring at field sites. However, ground data collection can be highly laborious and time consuming and thus more efficient methods to produce in situ measurements are required.
Drones offer a convenient measurement platform between those done on foot and from manned aircrafts. They also have the potential to provide autonomous test site monitoring and reduce laborious ground measurements requiring humans. MetEOC-3 continues the work started in the previous MetEOC projects in developing traceable procedures for collecting drone data and using it to estimate terrestrial biophysical ECVs.
Field campaign at Wytham Woods and the data
As part of these activities, researchers from Finnish Geospatial Research Institute (FGI), National Land Survey of Finland (NLS) in co-operation with NPL, performed drone-based laser scanning and hyperspectral imaging at the Wytham Woods test site in Oxford, UK.
The Wytham Woods test site has been measured in detail in MetEOC-2 using various ground-based instruments, creating a detailed virtual 3D model of the central one-hectare plot (also with UCL). This model has since been published in the scientific literature (https://bitbucket.org/tree_research/wytham_woods_3d_model/,https://www.mdpi.com/2072-4292/10/6/933/htm), generating significant interest. The available virtual model, together with radiative transfer simulations, offers a unique way to develop and validate drone-based methods for estimating ECVs.
A three day field campaign was conducted between the 21stand 23rdAugust 2018. The first half of the first field day was spent constructing ground control point network around the Wytham Woods test area to support georeferencing and geometric traceability. This is an important aspect in addition to radiometric traceability.
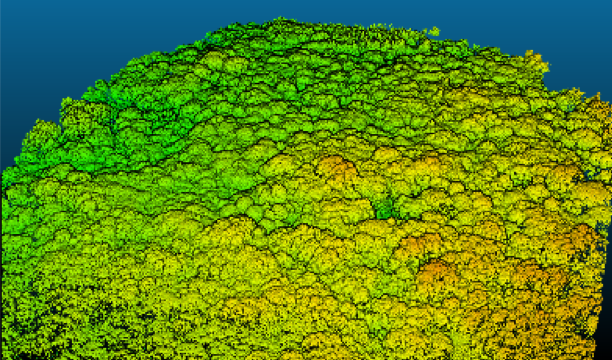
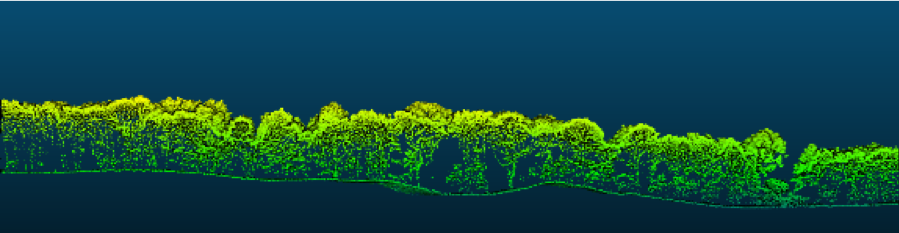
The second half of the first field day was spent performing drone-based laser scanning. Two measurements were conducted using FGI’s custom-build drone with Riegl miniVUX laser scanner, accompanied by an RGB camera and GNSS-IMU-system.

The drone-based laser scanning data was processed to a georeferenced point cloud where additional support for accurate flight trajectory computation was received from GNSS-reference station data from The British Isles continuous GNSS Facility (BIGF).
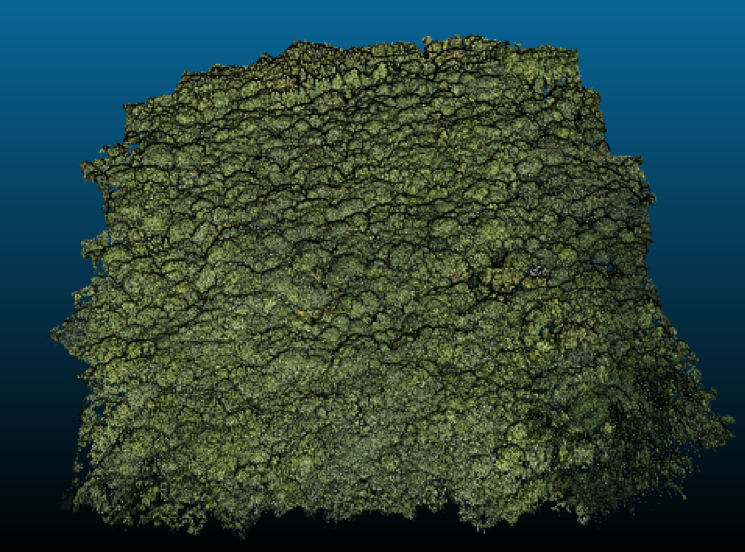
The drone-based hyperspectral and RGB imaging was performed on the second and third field days. Both days included two separate flights with FGI’s camera-based drone-system. The flight on the second day was planned to overlap with Sentinel 2.
The main imaging instruments in FGI’s camera system are the frame-based hyperspectral camera and FGI’s custom-build dual-RGB camera system with synchronization to dual-frequency GNSS-IMU system. The hyperspectral camera is used to provide the spectral data, whereas the dual-RGB camera system provides accurate geometric data.
The drone-system also included FGI’s novel irradiance measurement unit with tilt correction which observes the illumination conditions during the flight (which can be highly variable during a 20 minute flight). This data can be then used to transform the radiances, measured by the hyperspectral camera, to reflectance.
As additional support, NPL provided reference panel measurements on the ground with its spectrometer. The image data is then processed to photogrammetric point cloud and RGB and hyperspectral orthoimage.


Next steps
In the next steps we will develop and test methods for efficient test site characterization and ECV estimation using simulations done with the 3D virtual Wytham model and the newly collected and processed datasets. ECV’s, such as LAI and surface albedo, will be estimated.
In addition, one purpose of the drone data is to try to extend the existing one-hectare virtual 3D model of Wytham Woods to cover the larger six hectare area that was originally measured with the terrestrial LiDAR in MetEOC 2. The next measurement campaign we will be performed in Finland during summer of 2019.